This part of the NelinSys library contains two demos illustrating the use of its function blocks for simulation of nonlinear systems controlled by gain-scheduled controllers. Simulation of chosen example is started automatically, immediately after its selection from the menu (see the following picture) and during its first run it cannot be stopped - modifications of the simulation scheme are allowed only after the first simulation is over.
Simulation of gain-scheduled control of a 2 tanks without interaction nonlinear system (both input and output scheduling is included). The nonlinear system is described by following equations:

Simulink simulation scheme:
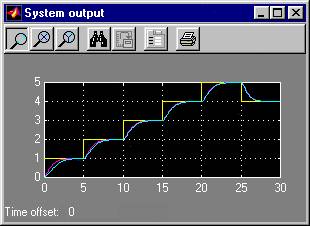
The control law of each of the two gain-scheduled controllers was calculated by the ProgZos application, desired closed-loop poles being [-2 -2]. Simulation results:
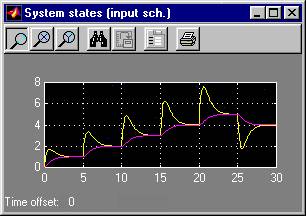
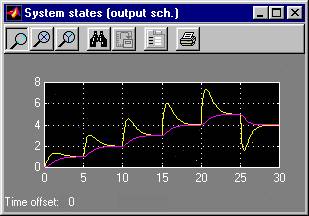
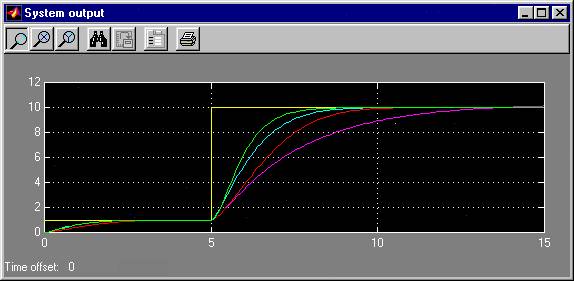
Simulation of control of a 2 tanks without interaction SISO system (see the state-space description above) by different types of controllers: linear controller designed for fixed operating point y0 = 1, input and output gain-scheduled controllers and exact-linearization-based controller. Simulink simulation scheme:
Synthesis of the gain-scheduled controllers and the fixed-point linear controller was carried out through the ProgZos application, while the exact linearization control design was performed by the ExaktSiso application. Simulation results: