Block calculates numeric solution of a 1st-order nonlinear autonomous system. The time interval in which the solution is calculated is specified by Simulink simulation parameters, however, if either NaN or Inf value is reached during the simulation, it is stopped immediately. The block is usually used in combination with the Vector XY Graph for Phase Portraits block that plots the calculated solution in phase plane, but it can also co-operate with other blocks (e.g. Selector or Scope) in order to treat phase trajectories individually.
Differential equation of a 1st-order nonlinear autonomous system in symbolic form. The convention to write mathematical operations is the same as the one used by MATLAB's Symbolic Math Toolbox. System output is denoted as y.
Real vector determining initial points of phase trajectories. Elements of the vector correspond to the x1-coordinates, the x2s are computed so that the points belong to system phase-plane trajectories. The size of the initial conditions vector determines the number of calculations running simultaneously.
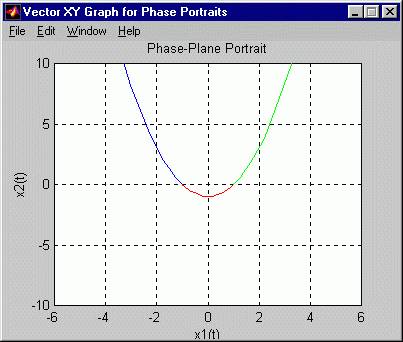
Simulink scheme and phase-plane portrait of nonlinear autonomous system y'(t) - y2(t) + 1 = 0 with initial conditions being y(0) = -10, y(0) = 0.9999, y(0) = 1.000001.